integrais de superfícies.
Uma superfície \mathbb{S} no \mathbb{R} ^3 pode ser representada implicitamente na forma f(x,y,z) = 0.
Esse tipo de função f(x,y,z) é chamada de Campo Escalar, ou Função de Várias Variáveis a Valores Reais, em geral são funções na forma f: A \subset \mathbb{R} ^n\rightarrow \mathbb{R}, que associa a cada n-upla de \mathbb{R} ^n um escalar.
Você precisa passar em cálculo? Não se preocupe, nós podemos ajudar! Clique aqui e descubra como podemos facilitar sua aprovação. |
De modo explícito, a mesma superfície \mathbb{S} pode ser dada por uma função vetorial dada por z=g(x,y), ou seja, uma função de duas variáveis reais a valores reais.
Vamos entender como.
REPRESENTAÇÃO EXPLÍCITA E IMPLÍCITA DE SUPERFÍCIES
Uma superfície \mathbb{S} no \mathbb{R} ^3 pode ser representada implicitamente na forma f(x,y,z) = 0, onde \nabla f(x,y,z) é o vetor normal à superfície e, se \nabla f \neq 0, então o vetor $$\vec{n} = \frac{\nabla f}{\left\| \nabla f \right\|}$$ é o vetor normal unitário de \mathbb{S}.
De modo explícito, a mesma superfície \mathbb{S} pode ser dada por uma função vetorial dada por z=g(x,y).
Para encontrarmos esta forma explícita basta isolar a variável z na forma implícita da superfície \mathbb{S}.
REPRESENTAÇÃO PARAMÉTRICA DE UMA SUPERFÍCIE
Uma superfície \mathbb{S} pode ser representada de modo paramétrico na forma $$r(u,v) = x(u,v)\vec{i} + y(u,v)\vec{j} + z(u,v)\vec{k}.$$
R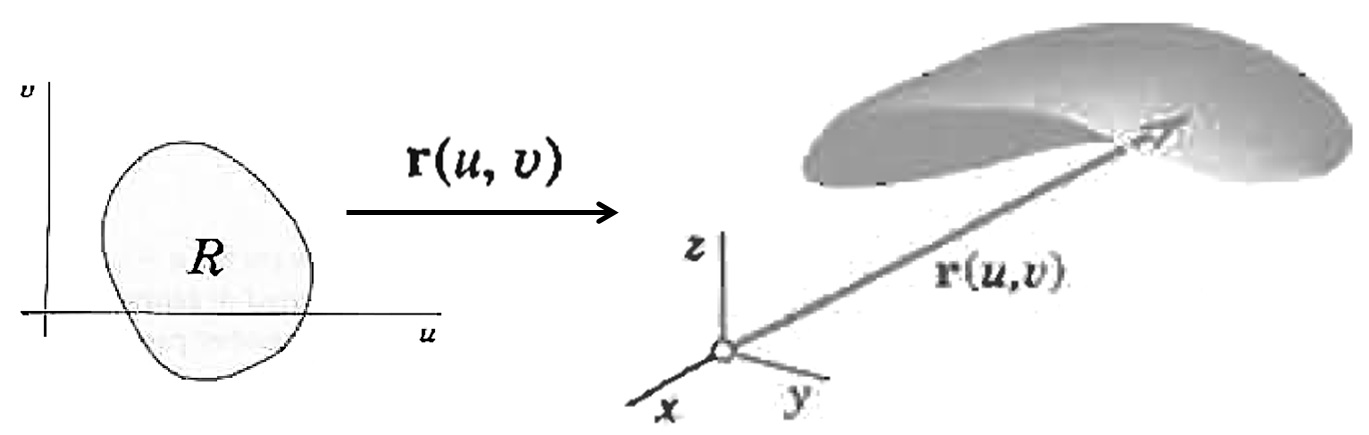
PLANO TANGENTE E SUPERFÍCIE NORMAL
que você confere aqui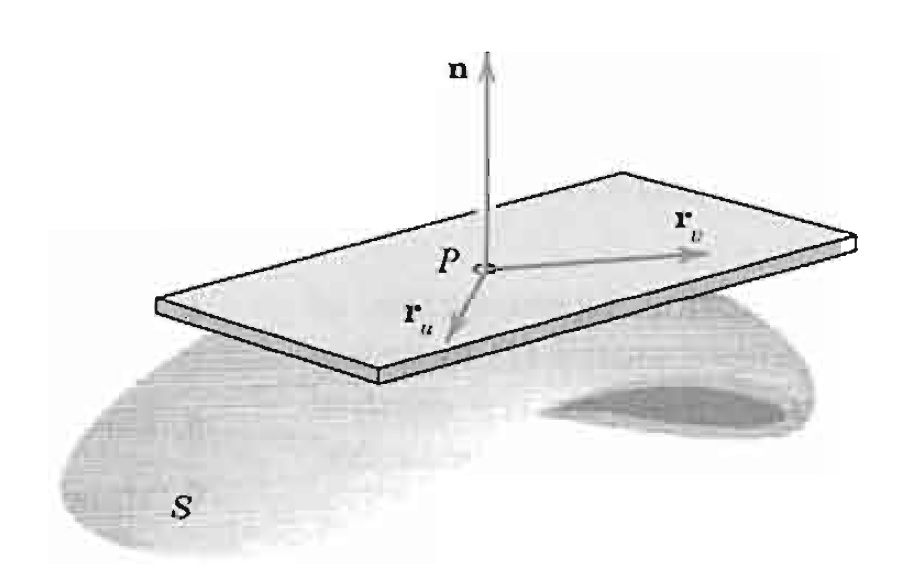 Plano tangente à superfície
Plano tangente à superfície
O QUE SÃO SUPERFÍCIES SUAVES?
DEFINIÇÃO (SUPERFÍCIE SUAVE): Uma superfície \mathbb{S} é chamada de superfície suave se sua superfície normal depende continuamente dos pontos de \mathbb{S}, ou seja, em cada ponto de uma superfície suave existe um único plano tangente à ela ligada a esse ponto.
Essa condição, é conhecida como condição de suavidade ou regularidade da superfície.pontos singulares. pontos singulares falsos.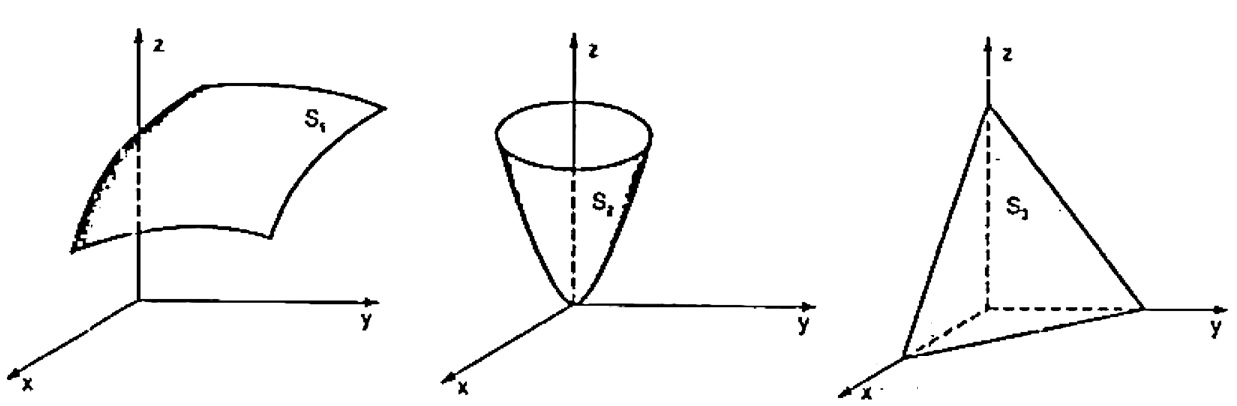 Exemplos de Superfícies Suaves
Exemplos de Superfícies Suaves
DEFINIÇÃO (SUPERFÍCIE SUAVE POR PARTES): Uma superfície \mathbb{S} é chamada de superfície suave por partes se é constituída de uma quantidade finita de porções de superfícies suaves.
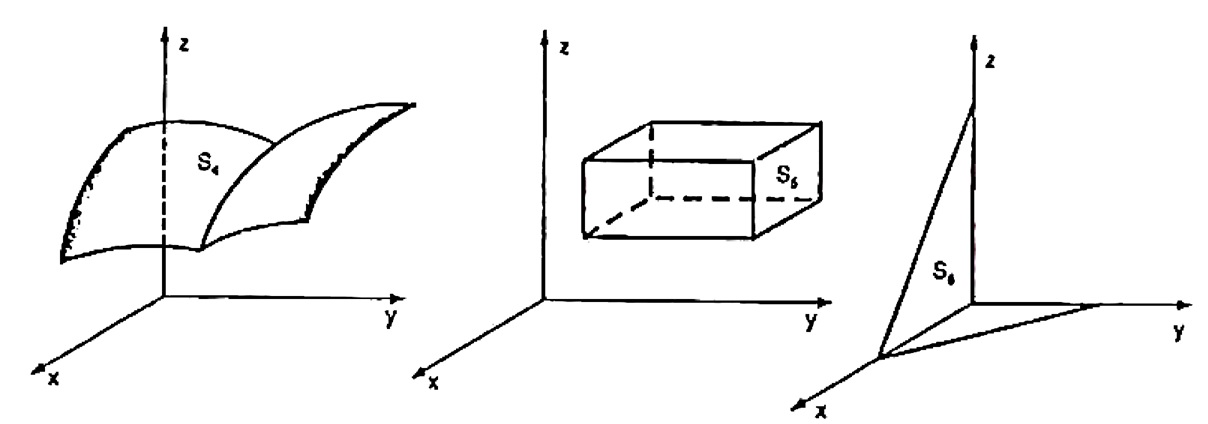 Exemplos de Superfícies Suaves por Partes
Exemplos de Superfícies Suaves por Partes
O QUE SÃO SUPERFÍCIES ORIENTÁVEIS?
superfície é orientável.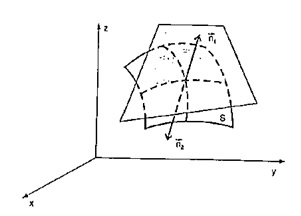 Exemplo de uma Superfície Orientável
Exemplo de uma Superfície Orientável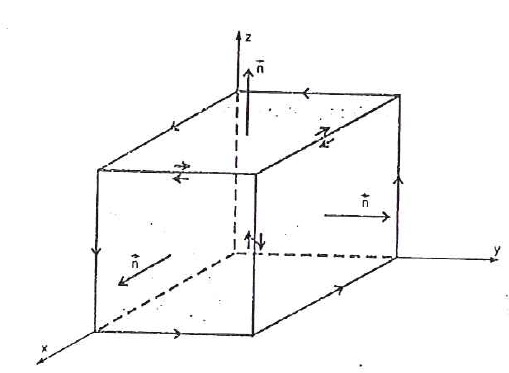 Orientação de um cubo: superfície externa
Orientação de um cubo: superfície externa
EXEMPLO (PARAMETRIZAÇÃO DO PLANO):
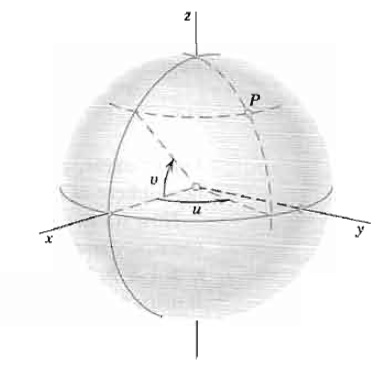
EXEMPLO (PARAMETRIZAÇÃO DA ESFERA):
Uma esfera com centro na origem e raio a pode ser representada pela função $$f(x,y,z,) = x^2+y^2+z^2-a^2=0.$$
xy
Já a parametrização da esfera é dada por:
$$r(u,v) = (a\cos{u}\cos{v})\vec{i} + (a\sin{u}\cos{v})\vec{j} + (a\sin{v})\vec{k},$$
onde 0\leq u \leq 2\pi e 0 \leq v \leq \pi.
Apoie Nosso Trabalho:
Apoie nosso trabalho fazendo um pix de qualquer valor: Chave Pix: 06713646697
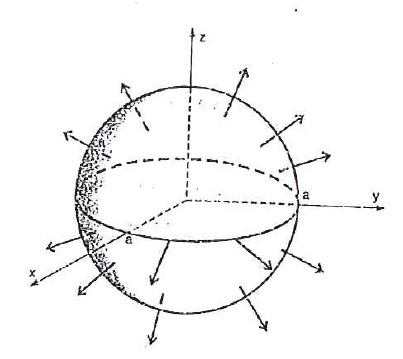 Campo de Vetores normais à esfera
Campo de Vetores normais à esfera
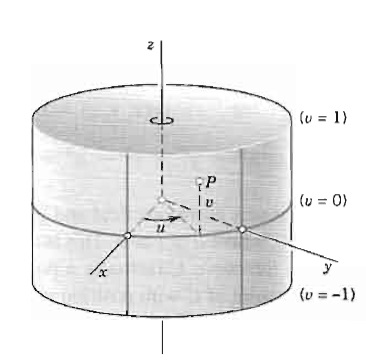
EXEMPLO (PARAMETRIZAÇÃO DO CILINDRO):
a, 2z
$$r(u,v) = (a\cos{u})\vec{i} + (a\sin{u})\vec{j} + (v\vec{k}),$$
onde 0\leq u \leq 2\pi e v \in [-1,1].
EXEMPLO (PARAMETRIZAÇÃO DO CONE):
EXEMPLO (A FAIXA DE MOBIUS):
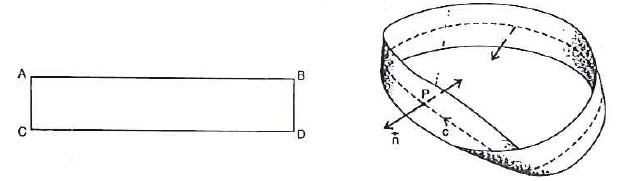 A Faixa de Mobius
A Faixa de Mobius
- É uma superfície com uma componente de fronteira;
- Não é orientável.
- Possui apenas um lado.
- Possui apenas uma borda.
- Representa um caminho sem fim nem início, infinito, onde se pode percorrer toda a superfície da fita que aparenta ter dois lados, mas só tem um.
Área da Superfície
- dA = \left\| \frac{\partial r}{\partial u} \wedge \frac{\partial r}{\partial v} \right\| dudv, se \mathbb{S} é denotada em sua forma paramétrica r(u,v);
- dA = \sqrt{1+\left( \frac{\partial g}{\partial x}\right)^2 + \left( \frac{\partial g}{\partial y}\right)^2}dxdy se \mathbb{S} é denotada em sua forma explícita z=g(x,y)
EXEMPLO R a.EXEMPLO
Leia Mais:
- Curvas no Espaço | Parametrização, Comprimento de Arco e Deslocamento de Partícula
- Derivadas Parciais | Funções de Várias Variáveis a Valores Reais
- Limite e Continuidade de Funções de Várias Variáveis Reais
- Funções de Várias Variáveis Reais a Valores Reais ou Campos Escalares
- EFEITO BORBOLETA | Edward Lorenz e a Teoria do Caos
- GRÁFICOS | Da Análise Estatística ao Mercado de Ações
