Você está tendo dificuldade para entender a lógica geométrica dos vetores? Este guia ilustrado detalha tudo o que você precisa saber sobre matemática vetorial.

Os vetores podem ser difíceis de entender. No entanto, com a abordagem correta e as técnicas de visualização, qualquer pessoa pode se sentir confortável com esse conceito matemático.
Neste guia, detalharemos os vetores no espaço e exploraremos suas propriedades por meio de ilustrações úteis, pois queremos apenas te apresentar a noção geométrica de vetor. Os vetores constituem uma importante ferramenta para o estudo da geometria analítica, da Físca, do Cálculo, etc. Você encontrará aqui as resposta para as perguntas:
- O que é um vetor?
- Como funciona um vetor?
- Pra que serve um vetor?
| Livro referência deste artigo sobre os Vetores: “Geometria Analítica”, de Steinbruch e Winterle. |
Relembrando as notações de geometria clássica
Os nossos ambientes de estudo na geometria analítica serão o plano \mathbb{R} ^2 e o espaço \mathbb{R} ^3 , que de forma intuitiva devem ser enxergados como os espaços físicos que nos cercam.
Os pontos nestes ambientes serão indicados por letras latinas maiúsculas ( A , B, C, D, ... ); as retas por letras latinas minúsculas ( r, s, t, ... ) e os planos por letras gregas minúsculas ( \alpha , \beta, \gamma, \pi, ... ).
Se uma reta r contem os pontos P e Q , falaremos em “reta PQ “; o segmento geométrico de extremidades P e Q será indicado por PQ . Quando um plano contém o pontos P , Q e R não colineares, falaremos em “plano PQR .”
| Assista nossa vídeo-aula sobre Vetores no nosso canal no YouTube – Inscreva-se no canal para ter aulas de matemática gratuitamente! |
Definições importantes para entender o que é um vetor
Vetores são objetos matemáticos que possuem magnitude e direção. Eles são comumente usados em física, engenharia e outros campos para descrever quantidades físicas como força e velocidade. Na geometria, eles são usados para representar linhas e planos no espaço.
Compreender os vetores é essencial para muitos conceitos matemáticos avançados. Mas até definirmos o que é um vetor com o rigor matemático precisamos estabelecer conceitos necessários.
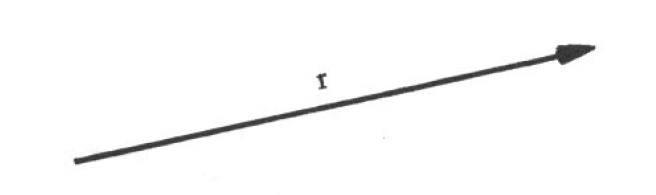
DEFINIÇÃO (reta orientada – eixo): Uma reta r é orientada quando se fixa nela um sentido de percurso, considerado positivo e indicado por uma seta como na figura abaixo. O sentido oposto é negativo. Uma reta orientada é denominada eixo.
DEFINIÇÃO (segmento orientado): Um segmento orientado é um par odenado de pontos, o primeiro denominado origem e o segundo denominado extremidade. Um segmento orientado de origem A e extremidade B , será representado por AB e geometricamente será indicado por uma reta que caracteriza visualmente o sentido do segmento como na figura abaixo.

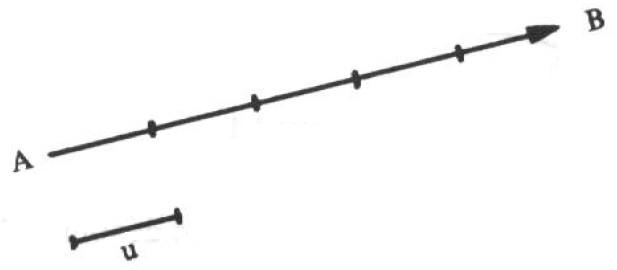
DEFINIÇÃO (Medida de um Segmento) Fixada uma unidade de comprimento, a cada segmento orientado pode-se associar um número real, não-negativo, que é a medida do segmento em relação àquela unidade. A medida do segmento orientado é seu comprimento ou seu módulo. O comprimento do segmento AB é indicado por \overline{PQ} .
OBSERVAÇÕES
- Um segmento nulo é aquele cuja extremidade coincide com a origem. Os segmentos nulos têm comprimento igual a zero;
- Se AB é um segmento orientado, o segmento orientado BA é oposto de AB . O comprimento de segmentos opostos é igual.
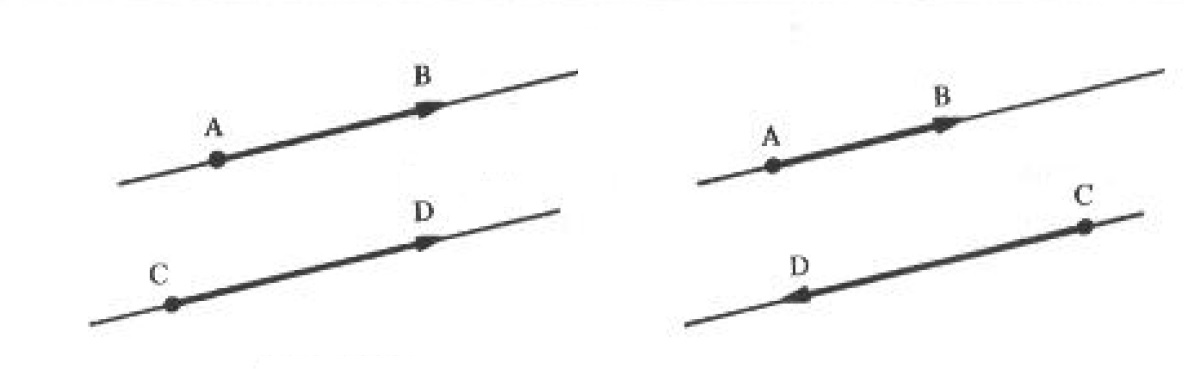
DEFINIÇÃO (Direção e Sentido): Dois segmentos não nulos AB e CD tem mesma direção se as retas suportes desses segmentos são paralelas ou coincidentes.

OBERVAÇÕES:
- Só se pode comparar os sentidos de dois segmentos orientados se eles têm a mesma direção;
- Dois segmentos orientados opostos têm sentidos contrários.
DEFINIÇÃO (Segmentos Equipolentes): Dois segmentos orientados AB e CD são equipolentes quando têm mesma direção, o mesmo sentido e o mesmo comprimento.
OBSERVAÇÕES:
- Dois segmentos nulos são sempre equipolentes;
- A equipolência dos segmentos AB e CD é representada por $$ AB \sim CD.$$
- Dado um segmento orientado AB e um ponto C , existe um único ponto D tal que AB \sim CD .
Enfim vamos definir o que é um vetor
Um vetor determinado por um segmento orientado AB é o conjunto de todos os segmentos orientados equipolentes a AB , como representado na figura abaixo.
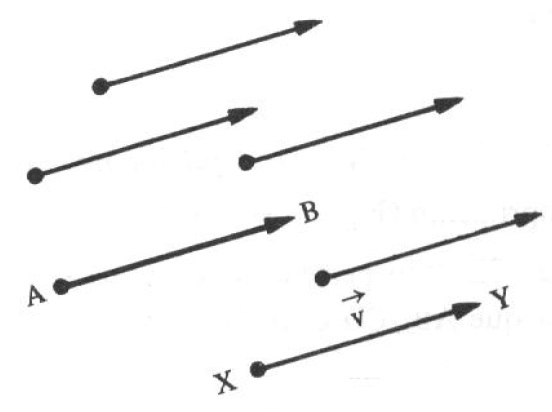
Se indicarmos como \vec{v} este conjunto, simbolicamente poderemos escrever: $$ \vec{v} = \left\{ XY; XY \sim AB \right\}$$ onde XY é um segmento qualquer do conjunto. O vetor determinado por AB é indicado por \vec{AB} ou B - A ou \vec{v} .
Portanto, um mesmo vetor \vec{AB} é determinado por uma infinidade de segmentos orientados, chamados representantes desse vetor, e todos equipolentes entre si. Ou seja, todos com mesma direção, sentido e comprimento. O módulo de \vec{v} se indica por | \vec{v} | .
Os Principais Tipos de Vetores
- Vetores Iguais: Dois vetores \vec{AB} e \vec{CD} são iguais se, e somente se, AB \sim CD ;
- Vetor Nulo: Os segmentos nulos, por serem equipolentes entre si, determinam um único vetor, chamado vetor nulo ou vetor zero, que é indicado por \vec{0} ;
- Vetores Opostos: Dado um vetor \vec{v} = \vec{AB} , o vetor \vec{AB} , o vetor \vec{BA} é o posto de \vec{AB} e se indica por - \vec{AB} ou por - \vec{v} .
- Vetor Unitário: Um vetor \vec{v} é unitário se | \vec{v} | = 1 .
- Versor: Dado um vetor não nulo \vec{v} , o versor é o vetor unitário de mesma direção e mesmo sentido de \vec{v} . Na figura abaixo, o vetor \vec{ u_{1}} é o versor de \vec{v} , pois mesmo \vec{ u_{2}} sendo unitário e tendo a mesma direção de \vec{v} , ele não tem seu sentido.

O versor de um vetor. - Vetores Colineares: Dois vetores \vec{u} e \vec{v} são colineares se tiverem a mesma direção, ou seja, se tiverem representantes pertencentes a uma mesma reta ou a retas paralelas.

Vetores Colineares - Vetores Coplanares: Se os vetores não nulos \vec{u} , \vec{v} e \vec{w} possuem representantes pertencentes a um mesmo plano são ditos complanares. Dois vetores são sempre coplanares, mas três vetores poderão ou não ser coplanares.


 Vetores coplanares e não-coplanares
Vetores coplanares e não-coplanares
A Soma de Vetores
Sejam os vetores \vec{u} e \vec{v} representados pelos segmentos orientados \vec{AB} e \vec{BC} como na figura abaixo.
Os pontos A e C determinam um vetor \vec{s} uqe é, por definição, a soma dos vetores \vec{u} e \vec{v} , isto é, \vec{s} = \vec{u} + \vec{v} .
PROPRIEDADES DA ADIÇÃO DOS VETORES:
Apoie Nosso Trabalho:
Apoie nosso trabalho fazendo um pix de qualquer valor: Chave Pix: 06713646697
- Comutativa: \vec{u} + \vec{v} = \vec{v} + \vec{u} ;
- Associatica: \left( \vec{u} + \vec{v} \right) + \vec{w} = \vec{u} + \left( \vec{v} + \vec{w} \right) ;
- O vetor \vec{0} é o vetor nulo da operação de adição, ou seja, \vec{v} + \vec{0} = \vec{v};
- O vetor - \vec{v} é o vetor oposto de \vec{v} , ou seja, \vec{v} + (- \vec{v} ) = \vec{0}.
A Diferença de Dois Vetores
Chama-se diferença de dois vetores \vec{u} e \vec{v} , e se representa por \vec{d} = \vec{u} - \vec{v} , ao vetor \vec{u} + \left( - \vec{v} \right) .
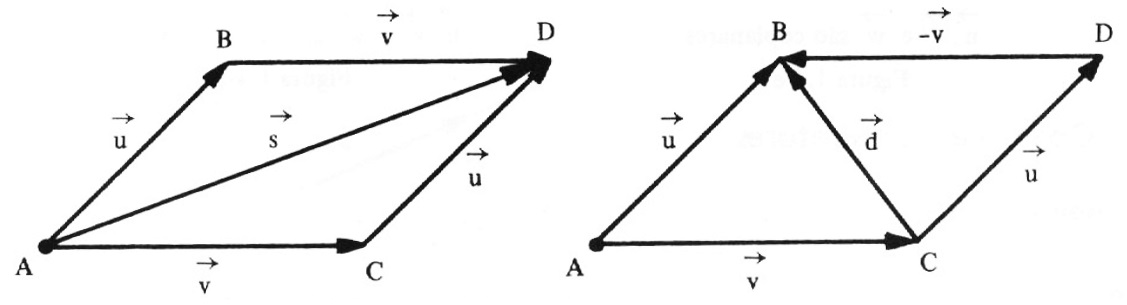
A Regra do Paralelogramo
Dados dois vetores \vec{u} e \vec{v} representados pelos segmentos orientados AB e AC , respectivamente, e construído o paralelogramo ABCD verifica-se que a soma \vec{s} = \vec{u} + \vec{v} é representada pelo segmento orientado AD (uma das diagonais) e que a diferença \vec{d} = \vec{u} - \vec{v} é representada pelo segmento orientado CB (a outra diagonal).
Multiplicação de Vetor por um Número Real
Dado um vetor \vec{v} \neq \vec{0} é um número real k \neq 0 , chama-se produto do número real k pelo vetor \vec{v} o vetor \vec{p} = k \vec{v} , tal que:
- módulo: | \vec{p} | = | k | | \vec{v} | ;
- direção: a mesma de \vec{v} ;
- sentido: o mesmo de \vec{v} se k > 0 e oposta a de \vec{v} se k < 0 .
PROPRIEDADES DO PRODUTO DE VETORES POR NÚMERO REAL:
Dados dois vetores \vec{u} e \vec{v} e a e b dois números reais, temos:
- a ( b \vec{v} ) = (ab) \vec{v} ;
- (a + b) \vec{v} ) = a \vec{v} + b \vec{v};
- a ( \vec{u} + \vec{v} ) = a \vec{u} + a \vec{v};
- 1 \vec{v} = \vec{v} .
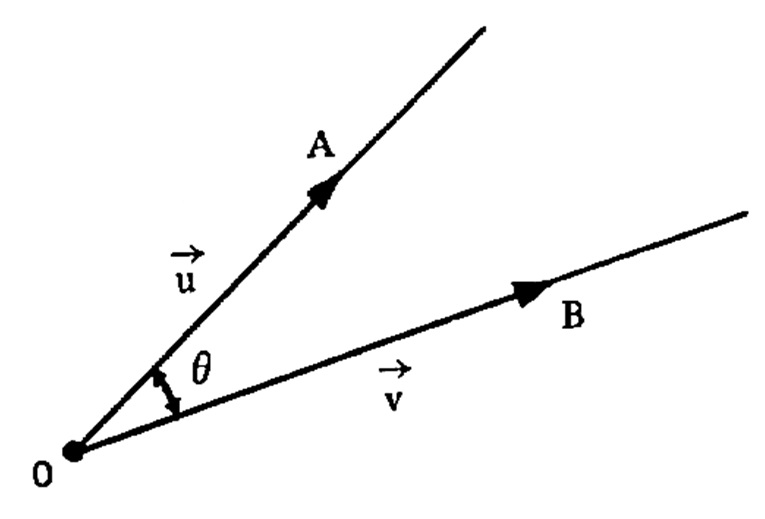
O Ângulo de Dois Vetores
O ângulo de dois vetores \vec{u} e \vec{v} não nulos é o ângulo \theta formado pelas semi-retas OA e OB , tal que 0 \leq \theta \leq \pi , como na figura abaixo:
OBSERVAÇÕES:
- Se \theta = \pi , então \vec{u} e \vec{v} têm a mesma direção e sentidos opostos;
- Se \theta = 0 , então \vec{u} e \vec{v} têm a mesma direção e o mesmo sentido;
- Se \theta = \dfrac{\pi}{2} , então \vec{u} e \vec{v} são ortogonais e indica-se \vec{u} \bot \vec{v} ; Neste caso, o triângulo retângulo OBC permite escrever $$ | \vec{u} + \vec{v} | ^2 = | \vec{u} | ^2 + | \vec{v} |^2 .$$

- O vetor nulo é ortogonal a qualquer vetor;
- Se \vec{u} é ortogonal a \vec{v} e m é um número real qualquer, \vec{u} é ortogonal a m \vec{v} .
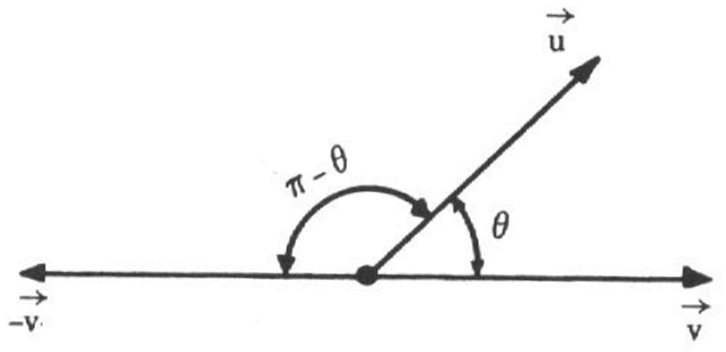
- O ângulo formado pelos vetores \vec{u} e - \vec{v} é o sulemento do ângulo de \vec{u} e \vec{v} , como na figura abaixo:

 Leia Mais Artigos Sobre Vetores:
Leia Mais Artigos Sobre Vetores:
 Leia Mais Artigos Sobre Vetores:
Leia Mais Artigos Sobre Vetores:- Vetor Gradiente | Definição, Campo Gradiente e Exercícios Resolvidos
- Campos Vetoriais | Definição e Primeiros Exemplos
