Você está tendo dificuldade para entender a lógica geométrica dos vetores? Este guia ilustrado detalha tudo o que você precisa saber sobre matemática vetorial.

Os vetores podem ser difíceis de entender. No entanto, com a abordagem correta e as técnicas de visualização, qualquer pessoa pode se sentir confortável com esse conceito matemático.
Neste guia, detalharemos os vetores no espaço e exploraremos suas propriedades por meio de ilustrações úteis, pois queremos apenas te apresentar a noção geométrica de vetor. Os vetores constituem uma importante ferramenta para o estudo da geometria analítica, da Físca, do Cálculo, etc. Você encontrará aqui as resposta para as perguntas:
- O que é um vetor?
- Como funciona um vetor?
- Pra que serve um vetor?
| Livro referência deste artigo sobre os Vetores: “Geometria Analítica”, de Steinbruch e Winterle. |
Relembrando as notações de geometria clássica
Os nossos ambientes de estudo na geometria analítica serão o plano \mathbb{R} ^2 e o espaço \mathbb{R} ^3 , que de forma intuitiva devem ser enxergados como os espaços físicos que nos cercam.
Os pontos nestes ambientes serão indicados por letras latinas maiúsculas ( A , B, C, D, ... ); as retas por letras latinas minúsculas ( r, s, t, ... ) e os planos por letras gregas minúsculas ( \alpha , \beta, \gamma, \pi, ... ).
Se uma reta r contem os pontos P e Q , falaremos em “reta PQ “; o segmento geométrico de extremidades P e Q será indicado por PQ . Quando um plano contém o pontos P , Q e R não colineares, falaremos em “plano PQR .”
| Assista nossa vídeo-aula sobre Vetores no nosso canal no YouTube – Inscreva-se no canal para ter aulas de matemática gratuitamente! |
Definições importantes para entender o que é um vetor
Vetores são objetos matemáticos que possuem magnitude e direção. Eles são comumente usados em física, engenharia e outros campos para descrever quantidades físicas como força e velocidade. Na geometria, eles são usados para representar linhas e planos no espaço.
Compreender os vetores é essencial para muitos conceitos matemáticos avançados. Mas até definirmos o que é um vetor com o rigor matemático precisamos estabelecer conceitos necessários.
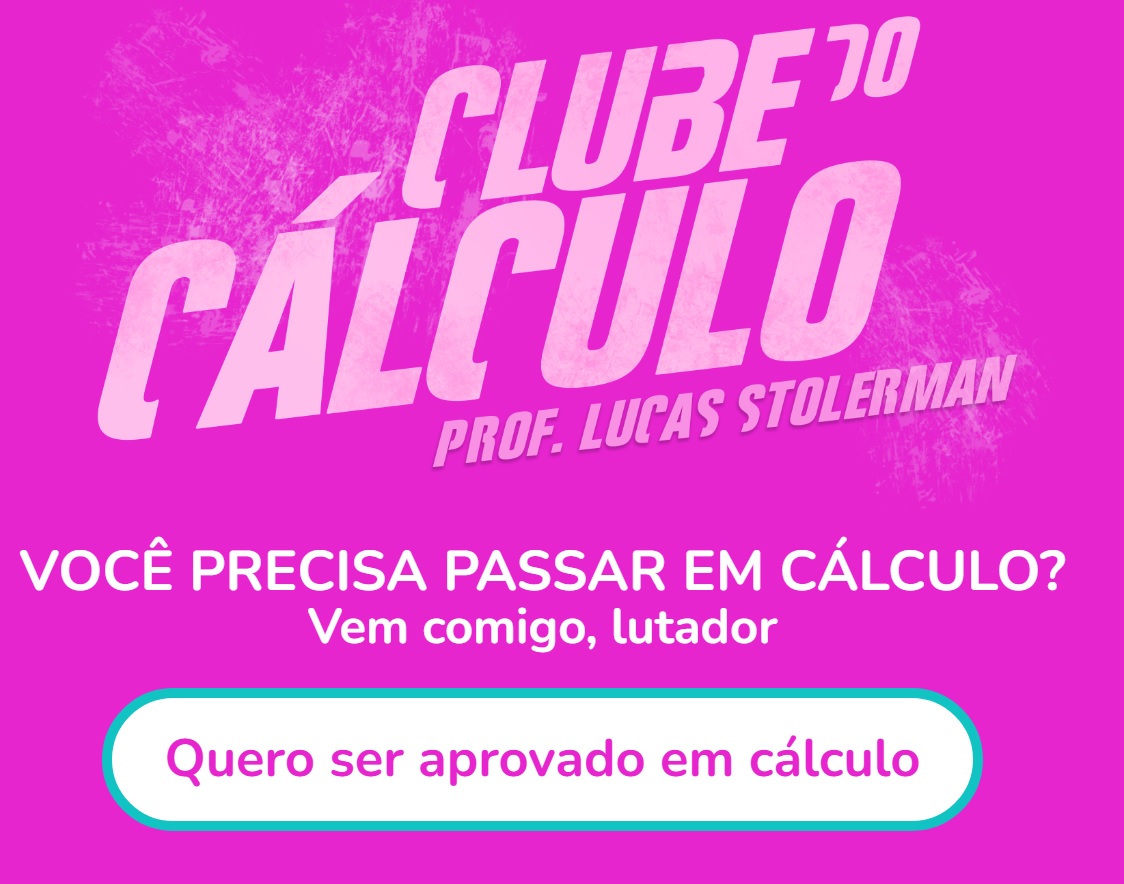
DEFINIÇÃO (reta orientada – eixo): Uma reta r é orientada quando se fixa nela um sentido de percurso, considerado positivo e indicado por uma seta como na figura abaixo. O sentido oposto é negativo. Uma reta orientada é denominada eixo.
 Reta Orientada – Eixo
Reta Orientada – Eixo
DEFINIÇÃO (segmento orientado): Um segmento orientado é um par odenado de pontos, o primeiro denominado origem e o segundo denominado extremidade. Um segmento orientado de origem A e extremidade B , será representado por AB e geometricamente será indicado por uma reta que caracteriza visualmente o sentido do segmento como na figura abaixo.
 O segmento orientado AB
O segmento orientado AB
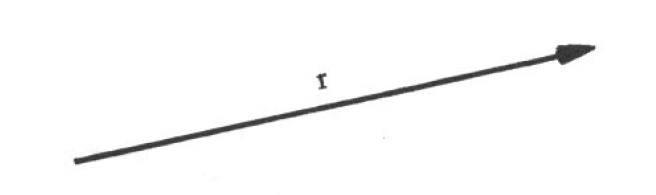
DEFINIÇÃO (Medida de um Segmento) Fixada uma unidade de comprimento, a cada segmento orientado pode-se associar um número real, não-negativo, que é a medida do segmento em relação àquela unidade. A medida do segmento orientado é seu comprimento ou seu módulo. O comprimento do segmento AB é indicado por \overline{PQ} .
 O comprimento do segmento AB neste caso é de 5 unidades de comprimento.
O comprimento do segmento AB neste caso é de 5 unidades de comprimento.
OBSERVAÇÕES
- Um segmento nulo é aquele cuja extremidade coincide com a origem. Os segmentos nulos têm comprimento igual a zero;
- Se AB é um segmento orientado, o segmento orientado BA é oposto de AB . O comprimento de segmentos opostos é igual.
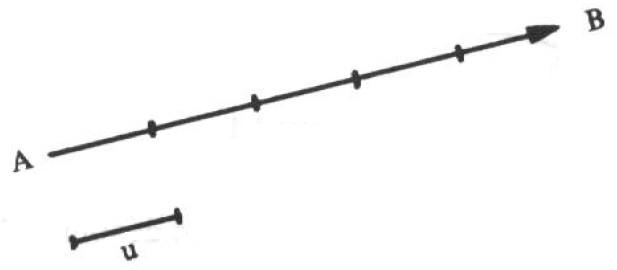
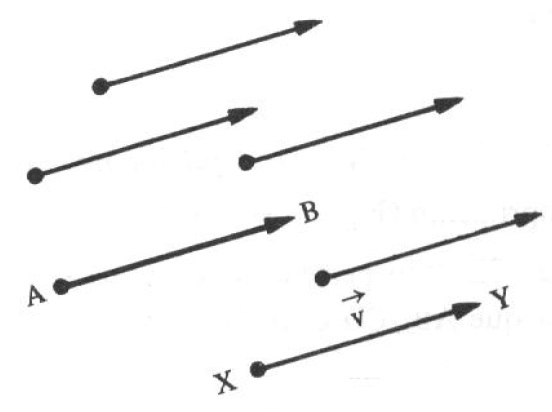
DEFINIÇÃO (Direção e Sentido): Dois segmentos não nulos AB e CD tem mesma direção se as retas suportes desses segmentos são paralelas ou coincidentes.
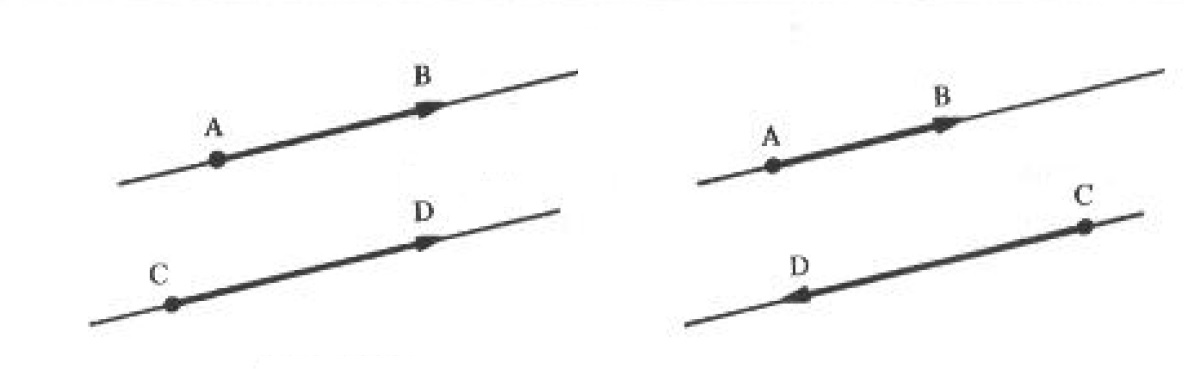 Dois pares de segmentos orientados com mesma direção.
Dois pares de segmentos orientados com mesma direção. Dois pares de segmentos orientados coincidentes (portanto, com mesma direção).
Dois pares de segmentos orientados coincidentes (portanto, com mesma direção).
OBERVAÇÕES:
- Só se pode comparar os sentidos de dois segmentos orientados se eles têm a mesma direção;
- Dois segmentos orientados opostos têm sentidos contrários.
DEFINIÇÃO (Segmentos Equipolentes): Dois segmentos orientados AB e CD são equipolentes quando têm mesma direção, o mesmo sentido e o mesmo comprimento.
OBSERVAÇÕES:
- Dois segmentos nulos são sempre equipolentes;
- A equipolência dos segmentos AB e CD é representada por $$ AB \sim CD.$$
- Dado um segmento orientado AB e um ponto C , existe um único ponto D tal que AB \sim CD .
Enfim vamos definir o que é um vetor
Um vetor determinado por um segmento orientado AB é o conjunto de todos os segmentos orientados equipolentes a AB , como representado na figura abaixo.
 Vetor
Vetor
Se indicarmos como \vec{v} este conjunto, simbolicamente poderemos escrever: $$ \vec{v} = \left\{ XY; XY \sim AB \right\}$$ onde XY é um segmento qualquer do conjunto. O vetor determinado por AB é indicado por \vec{AB} ou B - A ou \vec{v} .
Portanto, um mesmo vetor \vec{AB} é determinado por uma infinidade de segmentos orientados, chamados representantes desse vetor, e todos equipolentes entre si. Ou seja, todos com mesma direção, sentido e comprimento. O módulo de \vec{v} se indica por | \vec{v} | .
Os Principais Tipos de Vetores
- Vetores Iguais: Dois vetores \vec{AB} e \vec{CD} são iguais se, e somente se, AB \sim CD ;
- Vetor Nulo: Os segmentos nulos, por serem equipolentes entre si, determinam um único vetor, chamado vetor nulo ou vetor zero, que é indicado por \vec{0} ;
- Vetores Opostos: Dado um vetor \vec{v} = \vec{AB} , o vetor \vec{AB} , o vetor \vec{BA} é o posto de \vec{AB} e se indica por - \vec{AB} ou por - \vec{v} .
- Vetor Unitário: Um vetor \vec{v} é unitário se | \vec{v} | = 1 .
- Versor: Dado um vetor não nulo \vec{v} , o versor é o vetor unitário de mesma direção e mesmo sentido de \vec{v} . Na figura abaixo, o vetor \vec{ u_{1}} é o versor de \vec{v} , pois mesmo \vec{ u_{2}} sendo unitário e tendo a mesma direção de \vec{v} , ele não tem seu sentido.

O versor de um vetor. - Vetores Colineares: Dois vetores \vec{u} e \vec{v} são colineares se tiverem a mesma direção, ou seja, se tiverem representantes pertencentes a uma mesma reta ou a retas paralelas.

Vetores Colineares - Vetores Coplanares: Se os vetores não nulos \vec{u} , \vec{v} e \vec{w} possuem representantes pertencentes a um mesmo plano são ditos complanares. Dois vetores são sempre coplanares, mas três vetores poderão ou não ser coplanares.


 Vetores coplanares e não-coplanares
Vetores coplanares e não-coplanares
A Soma de Vetores
Sejam os vetores \vec{u} e \vec{v} representados pelos segmentos orientados \vec{AB} e \vec{BC} como na figura abaixo.
Os pontos A e C determinam um vetor \vec{s} uqe é, por definição, a soma dos vetores \vec{u} e \vec{v} , isto é, \vec{s} = \vec{u} + \vec{v} .
Apoie Nosso Trabalho:
Apoie nosso trabalho fazendo um pix de qualquer valor: Chave Pix: 06713646697
PROPRIEDADES DA ADIÇÃO DOS VETORES:
- Comutativa: \vec{u} + \vec{v} = \vec{v} + \vec{u} ;
- Associatica: \left( \vec{u} + \vec{v} \right) + \vec{w} = \vec{u} + \left( \vec{v} + \vec{w} \right) ;
- O vetor \vec{0} é o vetor nulo da operação de adição, ou seja, \vec{v} + \vec{0} = \vec{v};
- O vetor - \vec{v} é o vetor oposto de \vec{v} , ou seja, \vec{v} + (- \vec{v} ) = \vec{0}.
A Diferença de Dois Vetores
Chama-se diferença de dois vetores \vec{u} e \vec{v} , e se representa por \vec{d} = \vec{u} - \vec{v} , ao vetor \vec{u} + \left( - \vec{v} \right) .
A Regra do Paralelogramo
Dados dois vetores \vec{u} e \vec{v} representados pelos segmentos orientados AB e AC , respectivamente, e construído o paralelogramo ABCD verifica-se que a soma \vec{s} = \vec{u} + \vec{v} é representada pelo segmento orientado AD (uma das diagonais) e que a diferença \vec{d} = \vec{u} - \vec{v} é representada pelo segmento orientado CB (a outra diagonal).
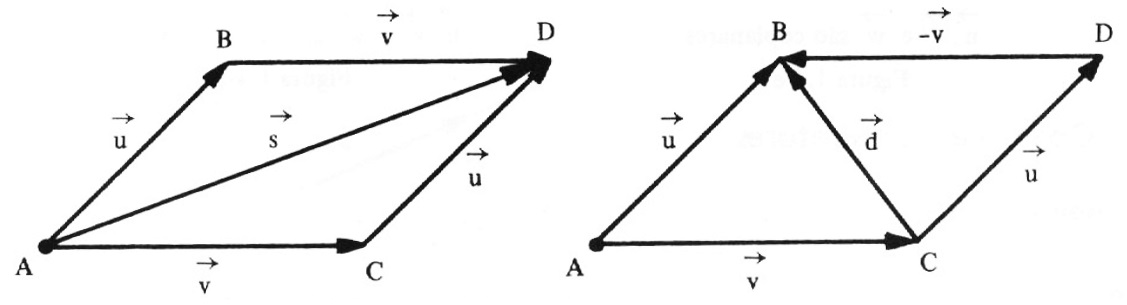 A Regra do Paralelogramo para adição e subtração de vetores
A Regra do Paralelogramo para adição e subtração de vetores
Multiplicação de Vetor por um Número Real
Dado um vetor \vec{v} \neq \vec{0} é um número real k \neq 0 , chama-se produto do número real k pelo vetor \vec{v} o vetor \vec{p} = k \vec{v} , tal que:
- módulo: | \vec{p} | = | k | | \vec{v} | ;
- direção: a mesma de \vec{v} ;
- sentido: o mesmo de \vec{v} se k > 0 e oposta a de \vec{v} se k < 0 .
PROPRIEDADES DO PRODUTO DE VETORES POR NÚMERO REAL:
Dados dois vetores \vec{u} e \vec{v} e a e b dois números reais, temos:
- a ( b \vec{v} ) = (ab) \vec{v} ;
- (a + b) \vec{v} ) = a \vec{v} + b \vec{v};
- a ( \vec{u} + \vec{v} ) = a \vec{u} + a \vec{v};
- 1 \vec{v} = \vec{v} .
O Ângulo de Dois Vetores
O ângulo de dois vetores \vec{u} e \vec{v} não nulos é o ângulo \theta formado pelas semi-retas OA e OB , tal que 0 \leq \theta \leq \pi , como na figura abaixo:
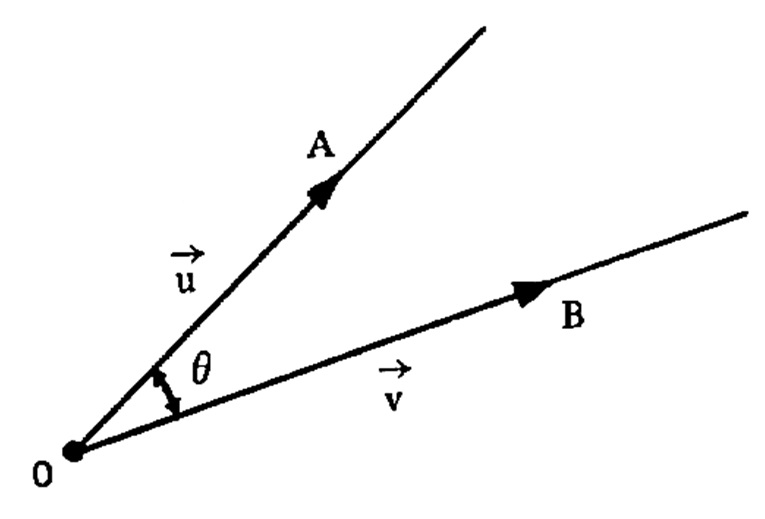 Ângulo entre vetoresOBSERVAÇÕES:
Ângulo entre vetoresOBSERVAÇÕES:
- Se \theta = \pi , então \vec{u} e \vec{v} têm a mesma direção e sentidos opostos;
- Se \theta = 0 , então \vec{u} e \vec{v} têm a mesma direção e o mesmo sentido;
- Se \theta = \dfrac{\pi}{2} , então \vec{u} e \vec{v} são ortogonais e indica-se \vec{u} \bot \vec{v} ; Neste caso, o triângulo retângulo OBC permite escrever $$ | \vec{u} + \vec{v} | ^2 = | \vec{u} | ^2 + | \vec{v} |^2 .$$

- O vetor nulo é ortogonal a qualquer vetor;
- Se \vec{u} é ortogonal a \vec{v} e m é um número real qualquer, \vec{u} é ortogonal a m \vec{v} .
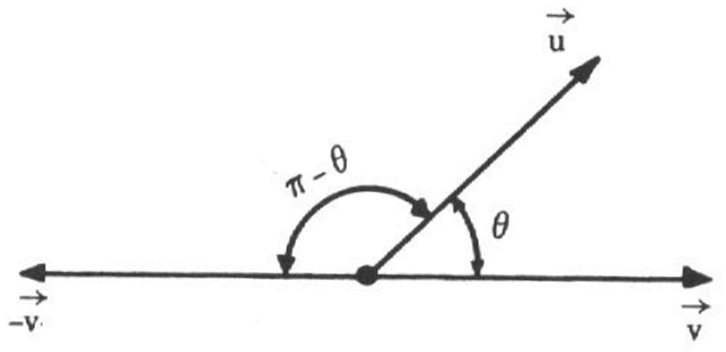
- O ângulo formado pelos vetores \vec{u} e - \vec{v} é o sulemento do ângulo de \vec{u} e \vec{v} , como na figura abaixo:

 Leia Mais Artigos Sobre Vetores:
Leia Mais Artigos Sobre Vetores:
 Leia Mais Artigos Sobre Vetores:
Leia Mais Artigos Sobre Vetores:- Vetor Gradiente | Definição, Campo Gradiente e Exercícios Resolvidos
- Campos Vetoriais | Definição e Primeiros Exemplos
