Você está tendo dificuldade para entender a lógica dos vetores no espaço tridimensional? Este guia ilustrado detalha tudo o que você precisa saber sobre matemática vetorial em três dimensões.

No mundo da matemática e da física, os vetores desempenham um papel fundamental na representação e análise de fenômenos tridimensionais. O espaço tridimensional, representado por \mathbb{R} ^3 , é um ambiente rico e complexo que oferece um vasto campo de estudo para os vetores. Este artigo é uma exploração aprofundada da teoria e aplicação de vetores em \mathbb{R} ^3 , abrangendo conceitos essenciais como decomposição, base canônica, soma e multiplicação por escalar.
Este artigo representa uma exploração abrangente dos vetores no espaço tridimensional \mathbb{R} ^3 , cobrindo tópicos essenciais como decomposição, base canônica, soma e suas aplicações em diversas disciplinas. A compreensão desses conceitos é fundamental para resolver problemas complexos e modelar fenômenos tridimensionais, tornando os vetores em \mathbb{R} ^3 uma ferramenta valiosa em matemática, física, engenharia e muito mais. Através deste estudo, esperamos que os leitores adquiram um conhecimento sólido que possa ser aplicado em uma ampla variedade de situações do mundo real.
Introdução às noções geométricas dos vetores
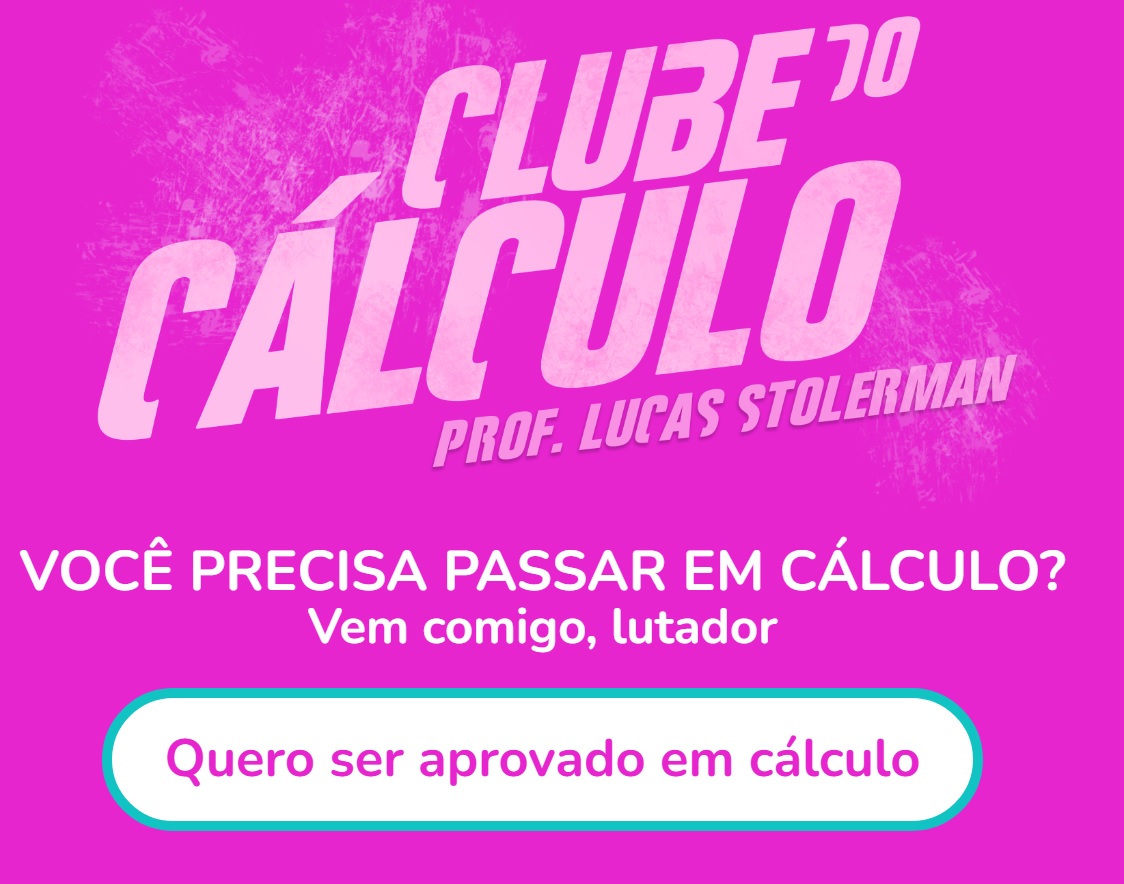
Neste artigo, vamos mostrar uma forma de representar os segmentos orientados relacionados com os sistemas de eixos cartesianos no plano. Geometricamente, um vetor determinado por um segmento orientado AB é o conjunto de todos os segmentos orientados equipolentes a AB , como representado na figura abaixo.
 Vetor
Vetor
Se indicarmos como \vec{v} este conjunto, simbolicamente poderemos escrever: $$ \vec{v} = \left\{ XY; XY \sim AB \right\}$$ onde XY é um segmento qualquer do conjunto. O vetor determinado por AB é indicado por \vec{AB} ou B - A ou \vec{v} .
Portanto, um mesmo vetor \vec{AB} é determinado por uma infinidade de segmentos orientados, chamados representantes desse vetor, e todos equipolentes entre si. Ou seja, todos com mesma direção, sentido e comprimento. O módulo de \vec{v} se indica por | \vec{v} | .
OBSERVAÇÃO:
- Dois vetores \vec{u} e \vec{v} são colineares se tiverem a mesma direção, ou seja, se tiverem representantes pertencentes a uma mesma reta ou a retas paralelas.

Vetores Colineares - Se os vetores não nulos \vec{u} , \vec{v} e \vec{w} possuem representantes pertencentes a um mesmo plano são ditos complanares. Dois vetores são sempre coplanares, mas três vetores poderão ou não ser coplanares.

Vetores coplanares e não-coplanares


| Os livros usados como referência deste artigo sobre Vetores no Plano são dados abaixo: | ||
O \mathbb{R} ^3 como um Espaço Vetorial
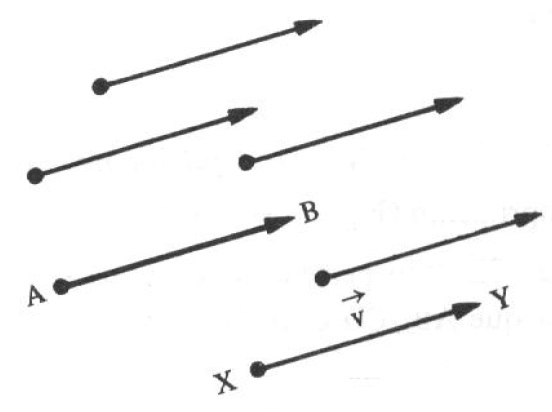
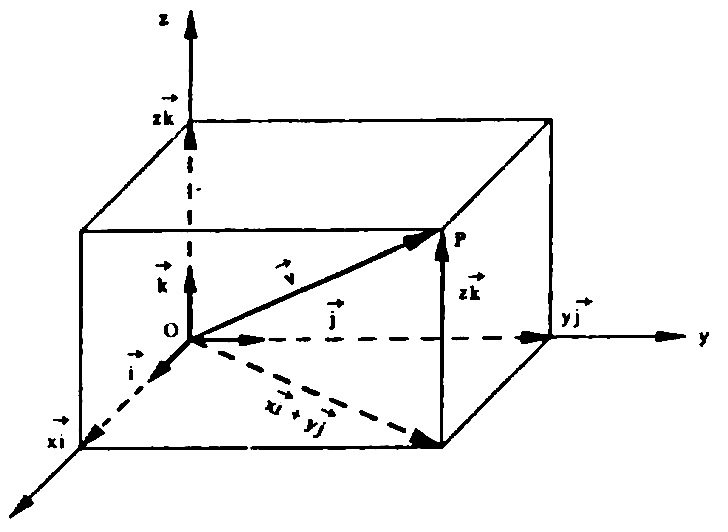
A Base Ortonormal do Espaço \mathbb{R} ^3
neste artigo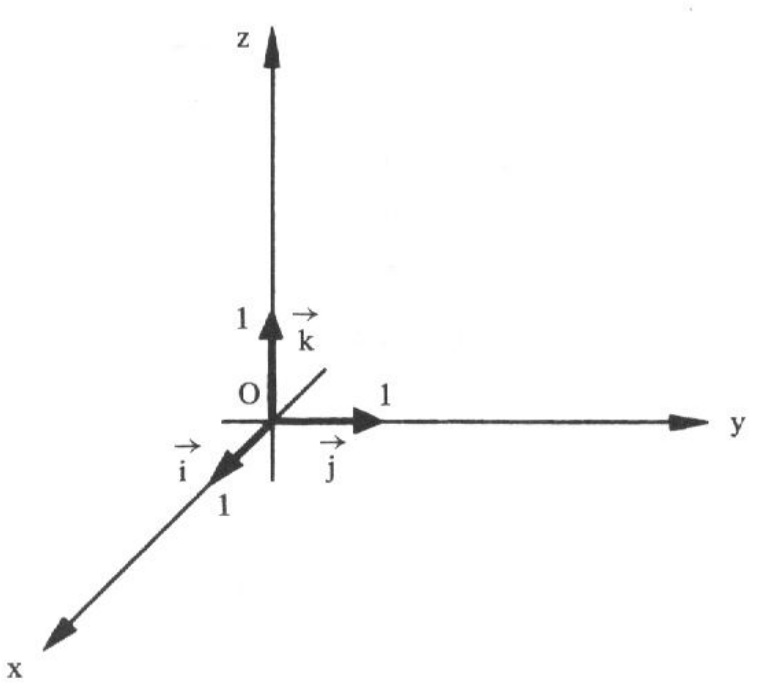
 Os planos coordenados no espaço: plano xOy, plano xOz e plano yOz, respectivamente.
Os planos coordenados no espaço: plano xOy, plano xOz e plano yOz, respectivamente.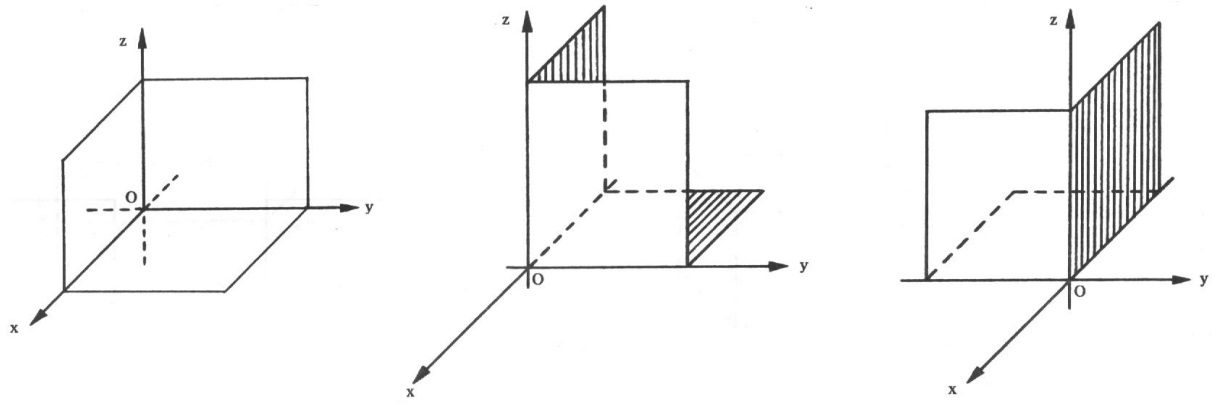 Primeiro, segundo e terceiro octantes, respectivamente.
Primeiro, segundo e terceiro octantes, respectivamente.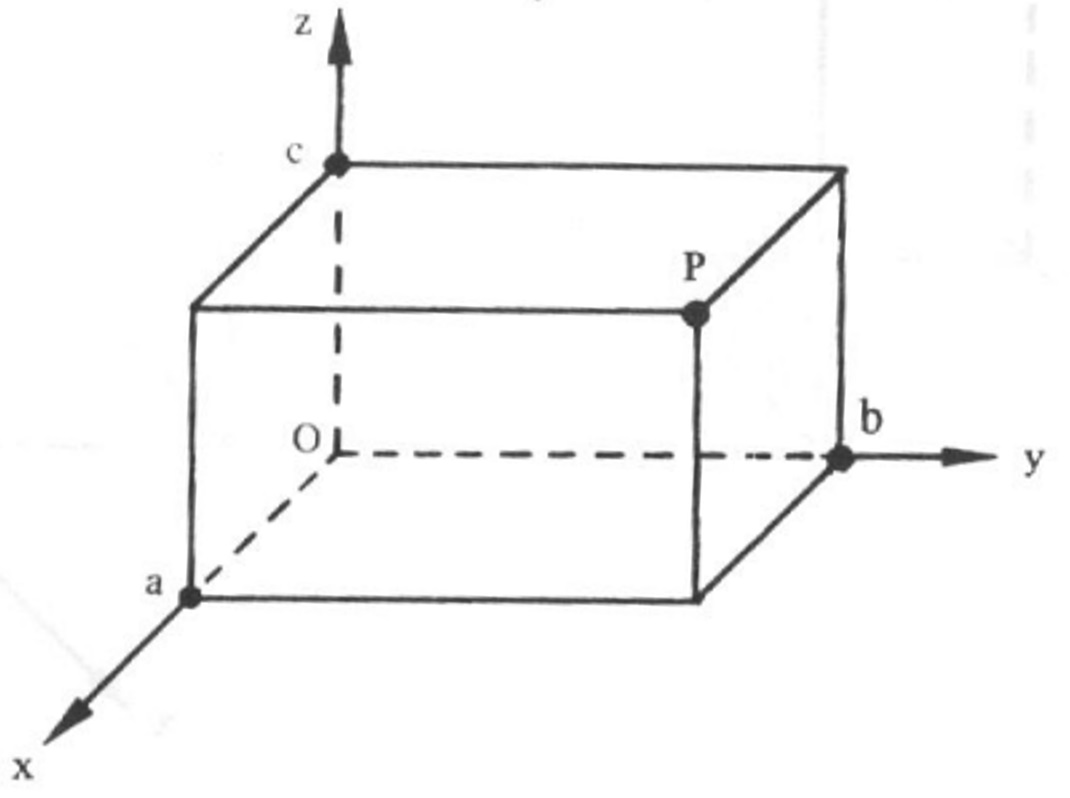
A Decomposição Vetorial no \mathbb{R} ^3
 Observações:soma de vetores, multiplicação por escalar, produto escalar produto vetorial.
Observações:soma de vetores, multiplicação por escalar, produto escalar produto vetorial.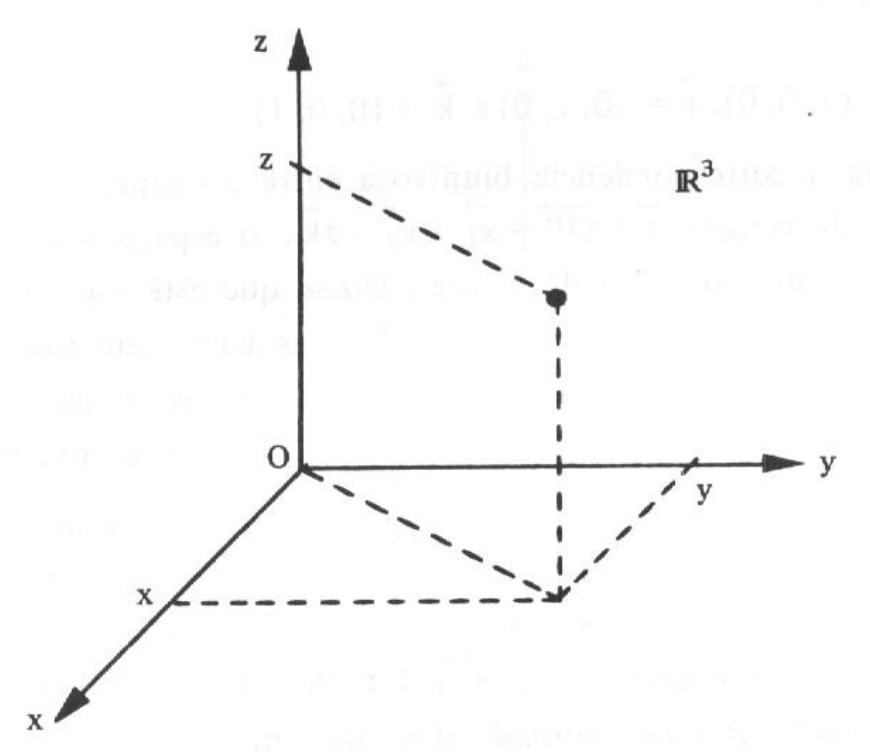
Apoie Nosso Trabalho:
Apoie nosso trabalho fazendo um pix de qualquer valor: Chave Pix: 06713646697
- A distância entre dois pontos distintos no \mathbb{R}^3 é sempre maior que zero;
- A distância entre dois pontos no \mathbb{R}^3 será nula se, e somente se, os dois pontos forem iguais;
- d(P,Q) = d(Q,P) ;
- d(P,Q) \leq d(P,R) + d(R,Q) ;
Exemplo:
Igualdade – Operações – Vetor Definido por Dois Pontos
- \vec{u} \pm \vec{v} é um elemento do espaço \mathbb{R}^3 e $$\vec{u} \pm \vec{v} = (x_1\pm x_2, y_1\pm y_2, z_1 \pm z_2).$$ Para esta operação de adição entre vetores, podemos garantir as seguintes propriedades $$ \vec{u} + \vec{v} = \vec{v} + \vec{u} ;$$ $$ \left( \vec{u} + \vec{v} \right) + \vec{w} = \vec{u} + \left( \vec{v} + \vec{w} \right) ;$$ $$ \vec{v} + \vec{0} = \vec{v} ;$$ $$ \vec{v} + (- \vec{v} ) = \vec{0} .$$.
- o produto do escalar de \lambda com o vetor \vec{u}, denotado por \lambda \vec{u}, é um elemento do espaço \mathbb{R}^3 dado por $$\lambda \vec{u} = (\lambda x_1, \lambda y_1, \lambda z_1 )$$ Para esta operação de multiplicação por escalar, podemos garantir as seguintes propriedades $$ a ( b \vec{v} ) = (ab) \vec{v}; $$ $$ (a + b) \vec{v} ) = a \vec{v} + b \vec{v};$$ $$ a ( \vec{u} + \vec{v} ) = a \vec{u} + a \vec{v}; $$ $$ 1 \vec{v} = \vec{v} .$$
oposto
Condição de Paralelismo de Dois Vetores
Observação:
Exemplos:
Leia Mais:
- O que é um Vetor? Um guia ilustrado dos vetores no espaço.
- Vetores no R² | Um guia ilustrado dos vetores no plano cartesiano
- Vetores no Plano R²: Norma e Produto Escalar
- Campos Vetoriais | Definição e Primeiros Exemplos
