Nesse artigo queremos apresentar uma introdução às funções vetoriais de várias variáveis, também chamadas de aplicações ou transformações.
Os termos aplicação e transformação são sinônimos de função e várias vezes são utilizadas para diferenciar as funções vetoriais de várias variáveis das demais.
Você precisa passar em cálculo? Não se preocupe, nós podemos ajudar! Clique aqui e descubra como podemos facilitar sua aprovação. |
Esta função associa cada n-upla ordenada (x_1,x_2, ..., x_n) \in A a um único vetor f(x_1,x_2, ..., x_n) \in \mathbb{R}^m, sendo m e n dois naturais diferentes de zero.
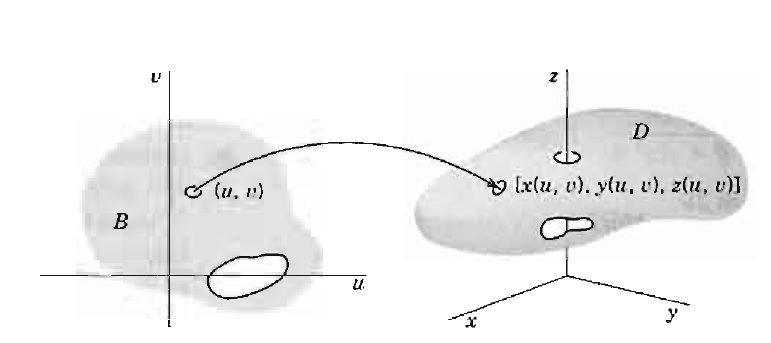
Uma função de n variáveis reais a valores vetoriais em \mathbb{R}^m é uma função f:A\rightarrow \mathbb{R}^m, onde A é um subconjunto não vazio de \mathbb{R}^n, denominado domínio de f.
O conjunto $$\left\{ f(x_1,x_2, …, x_n) \in \mathbb{R}^m; (x_1,x_2, …, x_n) \in A \right\}$$ é denominado imagem de f.
EXEMPLO
Seja f:\mathbb{R}^2 \rightarrow \mathbb{R}^3 dada por f(u,v) = (u, v, u^2 + v^2).
- Domínio de f: D_f = \mathbb{R}^2
- Imagem de f: Im_f = \left\{ (u, v, u^2 + v^2) \in \mathbb{R}^m; (u,v) \in \mathbb{R}^2 \right\}
É interessante observar que a imagem desta função descreve uma superfície no espaço que é um paraboloide.
EXEMPLO (Coordenadas Polares)
Considere a função \varphi: \mathbb{R} ^2 \rightarrow \mathbb{R} ^2 , tal que \varphi (\theta, \rho ) = ( \rho cos ( \theta), \rho sen ( \theta)) .
É interessante observar que, neste caso, as funções componentes são dadas por x( \rho, \theta) = \rho cos ( \theta) e y ( \rho, \theta) = \rho sen ( \theta) e que esta transformação leva retas e retângulos do plano \theta 0 \rho em circunferências e círculos no plano x 0 y , respectivamente.
Aplicações Inversas
As aplicações biunívocas são muito importantes porque elas possuem inversas.
Seja f uma aplicação biunívoca com domínio D e imagem E. Dado um ponto Q em E existe um só ponto P em D tal que f(P) = Q . Esse ponto P é definido como a imagem de Q pela aplicação inversa f^{-1} (Q) = P . Portanto, $$ P = f^{-1} (Q) \Leftrightarrow f(P) = Q .$$
EXEMPLO (Uma Transformação Linear)
Vamos considerar a transformação de f dada pelas equações $$ z = ax +by $$ $$ w = cx + dy, $$ onde a, b, c e d são constantes não nulas.
Esta aplicação tem a interessante propriedade de transformar restas em retas. De fato, os ponto P(x,y) de uma reta satisfazem equações paramétricas $$ x = mt + n, $$ $$ y = pt + q , $$ onde m, n, p e q são constantes e t é o parâmetro.
Substituindo-se essas equações no primeiro sistema obtemos as coordenadas do ponto f(P) = Q na fora $$ z = (am+bp)t + (an +bq), $$ $$ w = (cm +dp)t + (cn + dq), $$ que são, novamente, equações paramétricas de uma reta.
Por essa razão, uma transformação dada por $$ f(x,y) = (ax +by , cx + dy) $$ é chamada transformação linear.
Finalmente, notamos que esta transformação será invertível se, e somente se, ad - bc \neq 0o .
Transformação Linear
Uma transformação \vec{f} é dita linear se satisfaz as propriedades:
1) \vec{f } (x + y) = \vec{f} (x) + \vec{f} (y) ;
2) \vec{ f } (t x) = t \vec{f} (x) ;
Apoie Nosso Trabalho:
Apoie nosso trabalho fazendo um pix de qualquer valor: Chave Pix: 06713646697
Estas equações exprimem a linearidade da aplicação \vec{f} como este conceito costuma ser definido na Álgebra Linear.
EXEMPLO
Uma aplicação linear f no espaço \mathbb{R} ^3 é dada pelas fórmulas de transformação $$u = a_1 x + b_1 y + c_1 z ,$$ $$v = a_2 x + b_2 y + c_2 z ,$$ $$ w = a_3 x + b_3 y + c_3 z .$$
É fácil verificar, como no exemplo anterior, que esta aplicação transforma retas em retas e planos em planos. Além disso, ela também satisfaz as propriedades de linearidade enunciadas acima.
EXEMPLO (A Transformação por Raios Vetores Recíprocos ou Transformação de Kelvin)
Vamos descrever a transformação por reflexão no círculo unitário, também chamada transformação por raios vetores recíprocos ou transformação de Kelvin.
Dado P \neq \vec{0} , sua imagem f(P) é o ponto Q sobre o raio OP, satisfazendo a condição OQ = \dfrac{1}{OP} , como na figura abaixo:
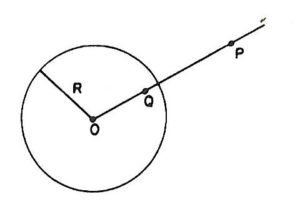 imagem refletida
imagem refletida
Leia Mais:
- Limite e Continuidade de Funções de Várias Variáveis Reais
- Funções de Variáveis Complexas | Limite e Continuidade
- Curvas | Limite e Continuidade de uma Função Vetorial
- Funções Vetoriais de Várias Variáveis | Transformações Lineares
- Funções Vetoriais de Várias Variáveis | O que são Campos Vetoriais?
- EFEITO BORBOLETA | Edward Lorenz e a Teoria do Caos
- Os Espaços Euclidianos R² e R³ | Cálculo de Várias Variáveis
- GRÁFICOS | Da Análise Estatística ao Mercado de Ações
Sugestão de Livros:
